
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
3.1 ģóöĄ(sh©┤)ąŻ£╩(zh©│n)ĘĮĘ©╦╝┬Ę
ģó┐╝ĪČ▓Ņ╦┘“ī(q©▒)äėÖC(j©®)Ų„╚╦▌åķgŠÓąŻ£╩(zh©│n)ĪĘĄ─╦╝┬ĘŻ║┐žųŲÖC(j©®)Ų„╚╦ū÷ūįą²▀\(y©┤n)äėŻ¼▀\(y©┤n)äėĄĮ─┐ś╦(bi©Īo)╬╗ū╦║¾═Żų╣Ż¼ė^▓ņÖC(j©®)Ų„╚╦īŹ(sh©¬)ļH═Żų╣╬╗ū╦┼c└Ēšō═Żų╣╬╗ū╦Ą─Ų½▓ŅŻ¼š{(di©żo)š¹śŗ(g©░u)ą═ģóöĄ(sh©┤)Ż¼ęį▒M┐╔─▄┐sąĪŲ½▓ŅĪŻ
×ķ╩▓├┤┐╔ęį▓╔ė├╔Ž╩÷ūįą²ĘĮ╩ĮüĒąŻ£╩(zh©│n)╔Ž╩÷ā╔ĘN╚½Ž“ęŲäėŲĮ┼_Ą─śŗ(g©░u)ą═ģóöĄ(sh©┤)Ż┐
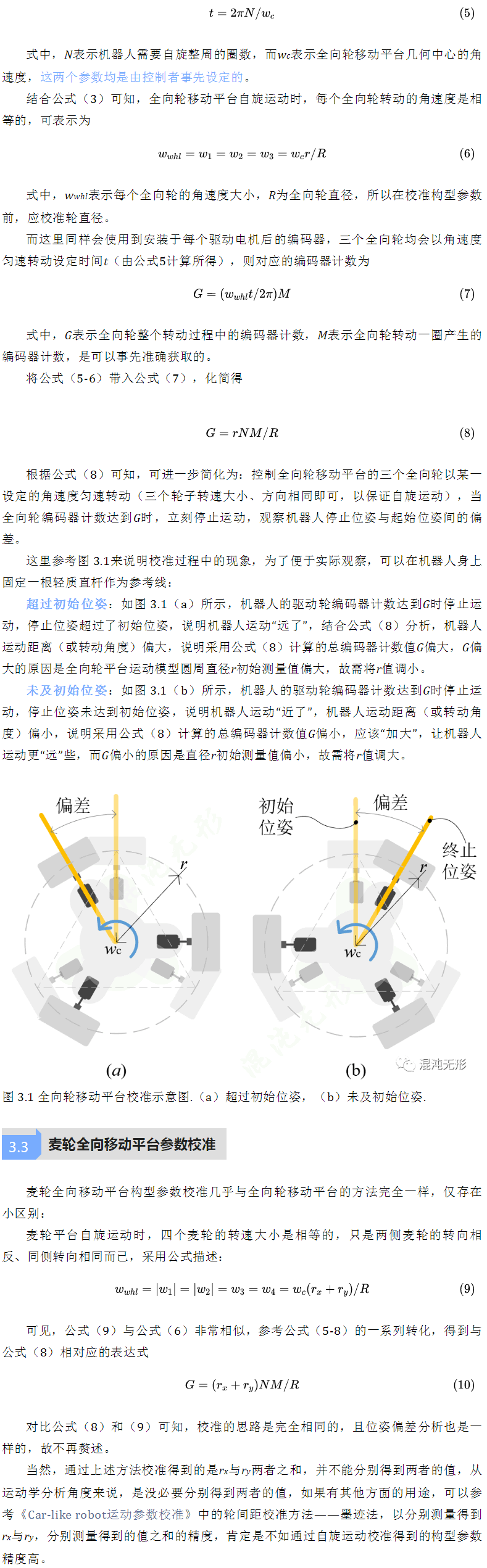
ė^▓ņ╣½╩ĮŻ©3-4Ż®Ż¼«ö(d©Īng)╚½Ž“ÖC(j©®)Ų„╚╦āHū÷ūįą²▀\(y©┤n)äėĢr(sh©¬)Ą─▀\(y©┤n)äėīW(xu©”)ĘĮ│╠Ż¼╦∙ėą“ī(q©▒)äė▌åĄ─▐D(zhu©Żn)╦┘┤¾ąĪŽÓ═¼Ż¼į┌▌åų▒ÅĮę蹯£╩(zh©│n)Ą─Ū░╠ߎ┬Ż¼╦∙ėą“ī(q©▒)äė▌å░┤ššįO(sh©©)Č©┤¾ąĪĄ─▐D(zhu©Żn)╦┘│»įO(sh©©)Č©Ą─ĘĮŽ“▐D(zhu©Żn)äėŻ¼─Ū├┤ÖC(j©®)Ų„╚╦īóĢ■ęį┤_Č©Ą─ĮŪ╦┘Č╚└@Äū║╬ųąą─ą²▐D(zhu©Żn)Ż¼╚ń╣¹ÖC(j©®)Ų„╚╦Äū║╬ųąą─ĮŪ╦┘Č╚╩Ū£╩(zh©│n)┤_Ą─Ż¼ät▀\(y©┤n)äėįO(sh©©)Č©Ģr(sh©¬)ķg║¾Ż¼ÖC(j©®)Ų„╚╦Ģ■═Ż┴¶į┌┤_Č©Ą─╬╗ū╦Ż©╩Ū┐╔═©▀^▀\(y©┤n)äėīW(xu©”)ĘĮ│╠ėŗ(j©¼)╦ŃĄ─Ż®Ż¼╝┘╚ń═Ż┴¶Ą─īŹ(sh©¬)ļH╬╗ū╦║═└Ēšōėŗ(j©¼)╦Ń╬╗ū╦▓╗ųž║ŽŻ¼ätšf├„╣½╩ĮŻ©3-4Ż®ųąĄ─ģóöĄ(sh©┤)▓╗£╩(zh©│n)┤_Ż¼ę▓Š═╩ŪÖC(j©®)Ų„╚╦śŗ(g©░u)ą═ģóöĄ(sh©┤)▓╗£╩(zh©│n)┤_Ż¼╣╩ąĶ꬚{(di©żo)š¹śŗ(g©░u)ą═ģóöĄ(sh©┤)Ż¼ęįīŹ(sh©¬)¼F(xi©żn)╔Ž╩÷═Ż┴¶Ą─īŹ(sh©¬)ļH╬╗ū╦║═└Ēšōėŗ(j©¼)╦Ń╬╗ū╦▒M┐╔─▄ųž║ŽŻ¼«ö(d©Īng)╬╗ū╦ųž║ŽĢr(sh©¬)ī”æ¬(y©®ng)Ą─śŗ(g©░u)ą═ģóöĄ(sh©┤)Š═╩ŪīŹ(sh©¬)ļH£╩(zh©│n)┤_Ą─ģóöĄ(sh©┤)Ż¼ę▓Š═ąŻ£╩(zh©│n)═Ļ│╔┴╦ĪŻ
3.2 ╚½Ž“▌åęŲäėŲĮ┼_ģóöĄ(sh©┤)ąŻ£╩(zh©│n)
╗∙ė┌╔Ž╩÷Ęų╬÷Ż¼▀@└’Ž╚ęį╚½Ž“▌åęŲäėŲĮ┼_×ķ└²Ż¼ĮY(ji©”)║Ž└Ēšō═Ųī¦(d©Żo)Ż¼ĻU╩÷ąŻ£╩(zh©│n)▀^│╠ĪŻ
═¼śėĄ─Ż¼×ķ▒Ńė┌ė^▓ņūįą²▀\(y©┤n)äė═Żų╣║¾Ą─╬╗ū╦Ż¼╦∙ęįįO(sh©©)Č©ÖC(j©®)Ų„╚╦ä“╦┘ūįą²š¹ų▄Ż¼▀@śė▒Ńė┌ī”▒╚ūįą²š¹ų▄Ū░║¾Ą─╬╗ū╦Ų½▓ŅŻ¼ūįą²š¹ų▄╦∙ąĶĢr(sh©¬)ķgt┐╔▒Ē╩Š×ķ
═©▀^Ū░╬─Ą─šōūCĘų╬÷Ż¼┐╔ęį┐┤│÷╚½Ž“ęŲäėŲĮ┼_Ą─śŗ(g©░u)ą═ģóöĄ(sh©┤)ąŻ£╩(zh©│n)įŁ└Ē║═ĘĮĘ©Č╝ĘŪ│ŻŽÓ╦ŲŻ¼Ą½╩Ūę▓┤µį┌ę╗Č©▓Ņ«ÉŻ║į┌ĪČ│ŻęŖęŲäėÖC(j©®)Ų„╚╦ČÓĮŪČ╚ī”▒╚Ęų╬÷ĪĘę╗╬─ųąėą╠ߥĮŻ¼╚½Ž“ęŲäėÖC(j©®)Ų„╚╦Ą─┘|(zh©¼)┴┐Ęų▓╝ī”ÖC(j©®)Ų„╚╦▀\(y©┤n)äėŠ½Č╚╩Ū┤µį┌▌^┤¾ė░ĒæĄ─Ż¼┘|(zh©¼)┴┐Ęų▓╝▓╗Š∙Ż¼╝┤╩╣┐žųŲÖC(j©®)Ų„╚╦“ī(q©▒)äė▌å▐D(zhu©Żn)╦┘ŽÓ═¼Ż¼ę▓ļyęįīŹ(sh©¬)¼F(xi©żn)═Ļ├└Ą─ūįą²▀\(y©┤n)äėŻ¼Ūę¹£▌å╚½Ž“ęŲäėŲĮ┼_╩Ū4éĆ(g©©)“ī(q©▒)äė▌åŻ¼Š½£╩(zh©│n)┐žųŲļyČ╚╩Ū▒╚╚½Ž“▌å╚½Ž“ŲĮ┼_ę¬┤¾Ą─Ż¼▀\(y©┤n)äė┐žųŲĖ³ėąļyČ╚ĪŻ
Č°Å─Ū░╬─Ęų╬÷┐╔ų¬Ż¼š²┤_Ą─ąŻ£╩(zh©│n)┴„│╠╩ŪŻ║Ž╚š{(di©żo)╣Ø(ji©”)ÖC(j©®)Ų„╚╦┘|(zh©¼)┴┐Ęų▓╝Ż¼▒ŻūCÖC(j©®)Ų„╚╦─▄ē“ū÷ć└(y©ón)Ė±Ą─ų▒ŠĆ▀\(y©┤n)äė║═ūįą²▀\(y©┤n)äėŻ¼Įėų°į┘ąŻ£╩(zh©│n)“ī(q©▒)äė▌åĄ─▌åų▒ÅĮĪČ│ŻęŖęŲäėÖC(j©®)Ų„╚╦▌åų▒ÅĮąŻ£╩(zh©│n)ĪĘŻ¼ūŅ║¾į┘ąŻ£╩(zh©│n)▒Š╬─╠ߥĮĄ─śŗ(g©░u)ą═ģóöĄ(sh©┤)ĪŻ
Ī░▐D(zhu©Żn)ūį╬óą┼╣½▒Ŗ╠¢Ż║╗ņŃń¤oą╬Ī▒
 |
| ÖC(j©®)Ų„╚╦šą╔╠ Disinfection Robot ÖC(j©®)Ų„╚╦╣½╦Š ÖC(j©®)Ų„╚╦æ¬(y©®ng)ė├ ųŪ─▄ßt(y©®)»¤ ╬’┬ō(li©ón)ŠW(w©Żng) ÖC(j©®)Ų„╚╦┼┼├¹ ÖC(j©®)Ų„╚╦Ų¾śI(y©©) ÖC(j©®)Ų„╚╦š■▓▀ Į╠ė²ÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ÖC(j©®)Ų„╚╦ķ_░l(f©Ī) ¬Ü(d©▓)ĮŪ½F Ž¹ČŠÖC(j©®)Ų„╚╦ŲĘ┼Ų Ž¹ČŠÖC(j©®)Ų„╚╦ ║Ž└Ēė├╦Ä ĄžłD |



