
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
Į©┴óū°ś╦ŽĄŻ║╚ńłD 2.1╦∙╩ŠŻ¼Į©┴óęįÖCŲ„╚╦Äū║╬ųąą─Ż©AC┼cDBĄ─Į╗³cŻ®×ķįŁ³cĄ─CENTERū°ś╦ŽĄŻ¼ÖCŲ„╚╦Ū░Ž“▀\äėĘĮŽ“×ķx▌Sš²ĘĮŽ“Ż©╝t╔½╝²Ņ^Ż®Ż¼┼cų«┤╣ų▒Ž“ū¾×ķy▌Sš²ĘĮŽ“Ż©ŠG╔½╝²Ņ^Ż®Ż¼z▌S┤╣ų▒ė┌╝ł├µŽ“═ŌŻ¼ØMūŃėę╩ųČ©ätĪŻ
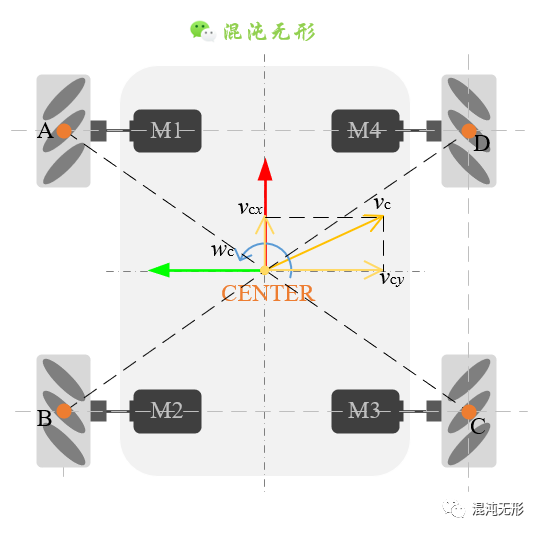
łD 2.1 Ī░ā╚░╦Ī▒śŗą═¹£▌åŲĮ┼_ū°ś╦ŽĄ╩ŠęŌłD
¹£▌åŲĮ┼_╩Ū╚½Ž“ęŲäėÖCŲ„╚╦Ą─įŁę“╩ŪŲõėą╚²éĆūįė╔Č╚Ż¼ęŌ╬Čų°┐╔ęįį┌ŲĮ├µā╚ū÷│÷╚╬ęŌĘĮŽ“ŲĮęŲ═¼Ģrūįą²Ą─äėū„Ż¼╚ńłD 2.1╦∙╩ŠŻ¼▓╔ė├╚╬ęŌĘĮŽ“Ą─ŠĆ╦┘Č╚╝░ĮŪ╦┘Č╚[vc w]TüĒ├Ķ╩÷CENTERĄ─╦┘Č╚Ż¼Č°vc┐╔čžų°ū°ś╦▌SĘųĮŌ×ķā╔éĆĘų╦┘Č╚Ż¼▒Ē╩Š×ķ[vcx vcy w]TĪŻ
ŲõŠĆ╦┘Č╚[vcx vcy]TĘĮŽ“×ķčžų°ū°ś╦▌Sš²ĘĮŽ“ät×ķš²Ż¼Ę┤ĘĮŽ“×ķžōŻ╗Č°ÖCŲ„╚╦─µĢrßśą²▐DĄ─Ģr║“Ż¼ĮŪ╦┘Č╚w×ķš²Ż¼Ę┤ų«×ķžōĪŻŻ©Č©┴xĘĮ╩Į┼cĪČā╔▌å▓Ņ╦┘“īäėÖCŲ„╚╦▀\äė─Żą═╝░æ¬ė├Ęų╬÷ĪĘųąĄ─ŽÓ╦ŲŻ®
į┌ī”¹£▌åŲĮ┼_▀\äėęÄ┬╔Ęų╬÷ų«Ū░ąĶę¬ū÷ā╔éĆ╗∙▒Š╝┘įOŻ║ó┘¹£▌åŲĮ┼_▀\äė▀^│╠ųąŻ¼▌åūė▓╗Ģ■æę┐šČ°░l╔·┐š▐D¼FŽ¾Ż╗ó┌¹£▌åŲĮ┼_┘|┴┐Ęų▓╝Š∙ä“Ż¼Ūę┘|ą─╬╗ų├į┌³cCENTER╠ÄŻ¼ęį▒ŻūC╦─éĆ▌åūėį┌Ąž├µĮėė|³c╩▄ĄĮĄ─ų¦ō╬┴”ŽÓ═¼Ż¼┤_▒Ż╦─éĆĄ╚▐D╦┘Ą─▌åūė╩▄ĄĮĄž├µū„ė├Ą──”▓┴┴”┤¾ąĪŽÓ═¼ĪŻ
╗∙ė┌╔Ž╩÷╝┘įOŚl╝■Ż¼▓ó░┤ššę╗Č©ęÄ┬╔┬ō║Ž┐žųŲ╦─éĆ▌åūėĄ╚╦┘▐DäėŻ¼▒Ń┐╔īŹ¼FĪŻ▀@╩Ūę“×ķ▌å▌×▌S┼c▌üūė▐D▌SŖAĮŪ│╩45Č╚Ż¼╚ńłD 1.2Ż©cŻ®╦∙╩ŠŻ¼čž▌üūė▌SŠĆĄ─ņo─”▓┴┴”┐╔čžų°▌å▌×▌SŽ“║═ÅĮŽ“ĘųĮŌŻ¼▀Mę╗▓Į▀węŲų┴łD 1.4Ęų╬÷Ż¼ų╗ėą«ö▌å▌×▌S┼c▌üūė▐D▌SŖAĮŪ│╩45Č╚ĢrŻ¼▓┼─▄▒ŻūCū¾ėę║═Ū░║¾ī”ĘQ╬╗ų├Ą─Ż©Ą╚╦┘Ż®¹£▌åį┌▌å▌×▌SŽ“╝░ÅĮŽ“╔ŽĄ─Ęų┴”┐╔ęįŪĪ║├ŽÓ╗źĄųŽ¹Ż¼▀MČ°ą╬│╔║Ž┴”Č°▀\äėĪŻ
ę¬ØMūŃ╔Ž╩÷Ą─Ęų┴”─▄ē“ŽÓ╗źĄųŽ¹Ą─Śl╝■╩Ū¹£▌åŻ©╗“ļŖÖCŻ®▐D╦┘┤¾ąĪŽÓ═¼Ż¼ę“×ķ├┐éĆ¹£▌å╩▄ĄĮĄ─Ąž├µų¦│ų┴”ŽÓ═¼Ż©╗∙ė┌╝┘įOó┘ó┌Ż®Ż¼4éĆļŖÖCėųä“╦┘Ą╚╦┘▐DäėŻ¼ęŌ╬Čų°ļŖÖC▌ö│÷┼żŠž┼cĄž├µū„ė├ė┌¹£▌åĄ──”▓┴┴”╩ŪŲĮ║ŌĄ─Ż¼4éĆ¹£▌å─”▓┴┴”į┌▌å▌×▌SŽ“║═ÅĮŽ“╔ŽĘųĮŌĄ─┤¾ąĪ╩ŪŽÓ═¼Ą─Ż¼Č°╦┘Č╚ĘųĮŌ┼c┴”ĘųĮŌŅÉ╦ŲŻ¼╦∙ęį4éĆ¹£▌åčž▌å▌×▌SŽ“║═ÅĮŽ“Ą─Ęų╦┘Č╚┤¾ąĪ╩ŪŽÓ═¼Ą─ĪŻ

 |
| ÖCŲ„╚╦šą╔╠ Disinfection Robot ÖCŲ„╚╦╣½╦Š ÖCŲ„╚╦æ¬ė├ ųŪ─▄ßt»¤ ╬’┬ōŠW ÖCŲ„╚╦┼┼├¹ ÖCŲ„╚╦Ų¾śI ÖCŲ„╚╦š■▓▀ Į╠ė²ÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ÖCŲ„╚╦ķ_░l ¬ÜĮŪ½F Ž¹ČŠÖCŲ„╚╦ŲĘ┼Ų Ž¹ČŠÖCŲ„╚╦ ║Ž└Ēė├╦Ä ĄžłD |



