ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒Pų„ę¬░³║¼ļŖÖC(j©®)Ż¼ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ż¼Ąū▒P┐žųŲŲ„║═Ųõ╦³įO(sh©©)éõĪŻĄū▒P┐žųŲŲ„┼cļŖ─X═©ą┼Ż¼░čļŖ─XųĖ┴ŅĮŌ╬÷║¾░l(f©Ī)╦═ĮoļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ż¼═¼Ģr(sh©¬)┐žųŲŲ„Ąū▒PŲõ╦³įO(sh©©)éõŻ¼▒╚╚ń┼÷ū▓é„ĖąŲ„Ż¼▒▄šŽé„ĖąŲ„Ż¼│õĘ┼ļŖ╣▄└ĒŻ¼╗“š▀┬Ģ╣ŌįO(sh©©)éõĄ╚ĪŻę▓ėąĄū▒P▓╗ė├Ąū▒P┐žųŲŲ„Ż¼ļŖ─Xų▒Įė┐žųŲļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„Ż¼śŗ(g©░u)│╔ūŅ║å(ji©Żn)å╬Ą─ÖC(j©®)Ų„╚╦Ąū▒PĪŻ
ę╗Īó▓Ņäė(d©░ng)Ąū▒P
▓Ņäė(d©░ng)Ąū▒Pų„ę¬ė╔ā╔éĆ(g©©)ų▒┴„ļŖÖC(j©®)ĪóŪ░║¾ā╔éĆ(g©©)╚fŽ“▌åśŗ(g©░u)│╔ĪŻ╚fŽ“▌å▓╔ė├£pšįO(sh©©)ėŗ(j©¼)Ż¼▒ŻūC╦─éĆ(g©©)▌åūė═¼Ģr(sh©¬)ĮėĄžŻ¼▒▄├Ō│÷¼F(xi©żn)┤“╗¼¼F(xi©żn)Ž¾ĪŻ
V=(Vr+Vl)/2 ū¾ėę▌åĄ─╦┘Č╚│²ęį2╩ŪĄū▒PĄ─╦┘Č╚V
W=(Vr-Vl)/L ū¾ėę▌å╦┘Č╚▓Ņ│²ęį▌åūėķgŠÓ╩ŪŲ½║ĮĮŪW
═Ųī¦(d©Żo)Ż║Vr=V+L*W/2 Vl=V-L*W/2
╦┘Č╚V(mm/s)┼c▐D(zhu©Żn)╦┘Ą─ĘĮ│╠Ż║n=V*60/(Pi*R) R╩Ū▌åūėų▒ÅĮ
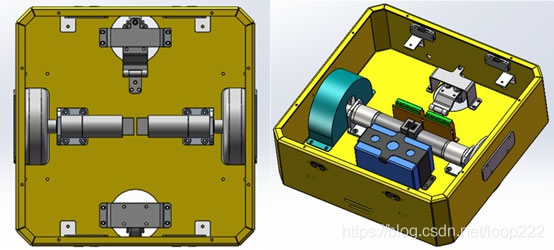
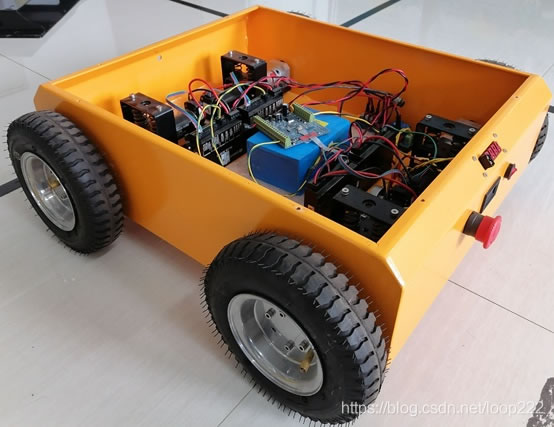
Č■Īó╦─“ī(q©▒)Ąū▒P
╦─“ī(q©▒)Ąū▒PūŅ┤¾Ą─å¢Ņ}╩Ūø]ėą▐D(zhu©Żn)Ž“▌åŻ¼▐D(zhu©Żn)ÅØĄ─Ģr(sh©¬)═Ļ╚½┐┐╦─éĆ(g©©)▌åūėĄ──”▓┴┴”īŹ(sh©¬)¼F(xi©żn)Ż¼╠žäe╩ŪįŁĄž▐D(zhu©Żn)╚”Ż¼▒╚▌^┐╝“×(y©żn)ļŖÖC(j©®)╣”┬╩║═▌å╠ź┘|(zh©¼) ┴┐
ĘĮ░Ėėąā╔ĘNŻ¼ę╗ĘN╩Ū╦─éĆ(g©©)▌åūė╦─éĆ(g©©)ļŖÖC(j©®)Ż¼ā×(y©Łu)³c(di©Żn)╩ŪĮY(ji©”)śŗ(g©░u)║å(ji©Żn)å╬Ż¼╚▒³c(di©Żn)╩Ū╦─éĆ(g©©)▌åūė▓╗─▄═Ļ╚½═¼▓ĮŻ¼Ģ■(hu©¼)ėąåó═Żš`▓ŅŻ¼ī¦(d©Żo)ų┬▌åūėČ┬▐D(zhu©Żn)ĪŻ
┴Ēę╗ĘN╩Ūā╔éĆ(g©©)ļŖÖC(j©®)Ż¼Ū░║¾ā╔éĆ(g©©)▌åūė═©▀^═¼▓ĮĦ▀BĮėŻ¼Ū░║¾▌åų«ķgø]ėą┴╦åó═Żš`▓ŅŻ¼ļŖÖC(j©®)╣”┬╩▀xō±╔į┤¾ę╗³c(di©Żn)Ż¼┼▄░žė═┬Ę║┴¤oē║ ┴”ĪŻ
╚²Īó┬─ĦĄū▒P
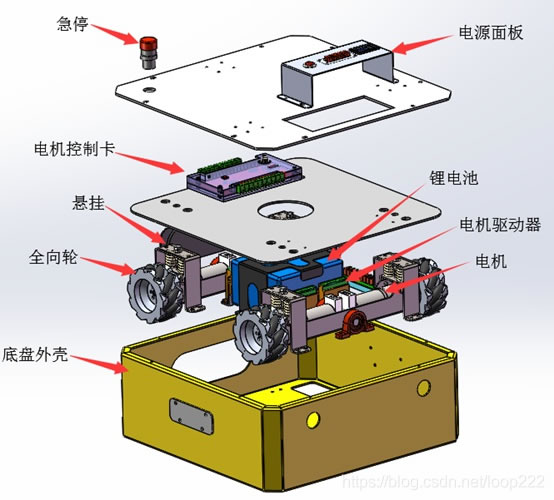
┬─ĦĄū▒Pų„ę¬╩ŪĮY(ji©”)śŗ(g©░u)Å═(f©┤)ļsŻ¼┐žųŲĘĮĘ©┼c▓Ņäė(d©░ng)═Ļ╚½ŽÓ═¼
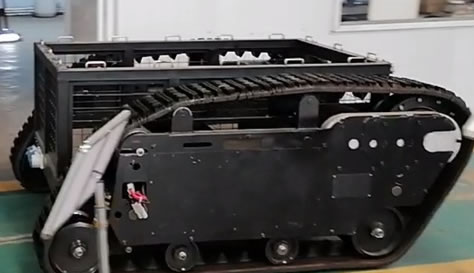
╦─Īó╚½Ž“¹£┐╦╝{─Ę▌åĄū▒P
¹£┐╦╝{─Ę▌åĄ─▀\(y©┤n)äė(d©░ng)īW(xu©”)ĘĮ│╠▒╚▌^Å═(f©┤)ļsŻ¼░³║¼╚²éĆ(g©©)ģóöĄ(sh©┤)Ż¼╦┘Č╚sppedĪóŲ½║ĮĮŪomega║═ūįą²ĮŪČ╚thetaŻ¼┼c▓Ņäė(d©░ng)Ąū▒PŽÓ▒╚ČÓ┴╦ūįą²ĮŪČ╚thetaĪŻļŖ─X═©▀^RS485░l(f©Ī)╦═ųĖ┴ŅĮoĄū▒P┐žųŲŲ„Ż¼speedŻ©å╬╬╗mmŻ®║═omegaŻ©å╬╬╗rad/s*1000Ż®║═thetaŻ©å╬╬╗ ĪŃŻ®Ż¼Ąū▒P┐žųŲŲ„ĮŌ╬÷║¾░l(f©Ī) ╦═Įo╦─éĆ(g©©)ļŖÖC(j©®)“ī(q©▒)äė(d©░ng)Ų„ĪŻ
ÖC(j©®)Ų„╚╦Ąū▒Pį┌ęŲäė(d©░ng)Ą─▀^│╠ųą,ō■(j©┤)¼F(xi©żn)ł÷(ch©Żng)Łh(hu©ón)Š│Ą─╚²ŠS╔ŅČ╚ą┼Žó,īŹ(sh©¬)Ģr(sh©¬)Ą─ČŃ▒▄šŽĄK╬’ų▒ų┴ĄĮ▀_(d©ó)ūŅĮK─┐ś╦(bi©Īo)³c(di©Żn),┐╔ęįĘųĮŌ×ķ╚²▓┐ĘųĄ─ęĢėX╦ŃĘ©,ęĢėX╦ŃĘ©Ą─╗∙ĄA(ch©│)╩Ūé„ĖąŲ„
ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ą─Ąū▒PĮY(ji©”)śŗ(g©░u)įO(sh©©)ėą║▄ČÓĘN,├┐ę╗éĆ(g©©)ī”(du©¼)ė┌ĮoČ©ros╦┘Č╚ą┼ŽóĢr(sh©¬)Ą─╦┘Č╚ĮŌ╬÷,Ģ■(hu©¼)Ė∙ō■(j©┤)Ųõūį╔ĒĄ─śŗ(g©░u)įņ┼c▀\(y©┤n)äė(d©░ng)╠ž³c(di©Żn)Č°░l(f©Ī)╔·ūā╗»,Įo│÷Š▀¾wĄ─╦┘Č╚ĮŌ╬÷╣½╩Į╣®ģó┐╝
ę╗┐Ņ│╔╩ņŪę┴┐«a(ch©Żn)Ą─ÖC(j©®)Ų„╚╦Ąū▒PīŹ(sh©¬)“×(y©żn)ŲĮ┼_(t©ói)Š▀éõ:Ąū▒P─▄┴”ę¬▀^ė▓,Ąū▒PöU(ku©░)š╣ąįę¬ÅŖ(qi©óng)┐╔ęį┤Ņ▌d▓╗═¼æ¬(y©®ng)ė├,īŹ(sh©¬)¼F(xi©żn)┐ņ╦┘Č■┤╬ķ_░l(f©Ī),Ąū▒Pæ¬(y©®ng)ė├ę¬ÅV,Ąū▒PĘ■äš(w©┤)ꬊ½
Ąū▒PĄ─ār(ji©ż)Ė±Ą─Ė▀Ą═į┌ę╗Č©│╠Č╚╔ŽĢ■(hu©¼)ė░Ēææ¬(y©®ng)ė├Č╦Ą─Įė╩▄│╠Č╚;ÖC(j©®)Ų„╚╦Ą─æ¬(y©®ng)ė├ł÷(ch©Żng)Š░ī”(du©¼)ÖC(j©®)Ų„╚╦Ąū▒PĄ─╩╣ė├╠ßĖ▀┴╦ę¬Ū¾;Ąū▒Pī¦(d©Żo)║ĮĘĮ╩ĮĄ─▀xō±Ēō╩Ūę╗éĆ(g©©)┐╝æ]ę“╦ž
╦╔ņ`ÖC(j©®)Ų„╚╦ą┬ŲĘRANGER,ąąśI(y©©)╝ē(j©¬)Ė▀ąį─▄,Ė▀ÖC(j©®)äė(d©░ng),┤¾▌dųž,╚½Ž“ą═ī¦(d©Żo)║ĮĄū▒PÖC(j©®)Ų„╚╦,ÅVĘ║æ¬(y©®ng)ė├ė┌╣ż│╠,─▄į┤,ĄVģ^(q©▒),╬’┴„,▐r(n©«ng)śI(y©©),░▓Ę└Ą╚æ¬(y©®ng)ė├ł÷(ch©Żng)Š░
╦«Ą╬ŽĄ┴ą║═ĘĮų█ŽĄ┴ą╩Ūę╗┐Ņ░³║¼═Ļš¹│╔╩ņĖąų¬,šJ(r©©n)ų¬╝░Č©╬╗ī¦(d©Żo)║Į─▄┴”Ą─▌å╩ĮÖC(j©®)Ų„╚╦ŲĮ┼_(t©ói),ų┬┴”ė┌×ķĖ„ąąĖ„śI(y©©)╝Ü(x©¼)Ęų╩ął÷(ch©Żng)ųąĄ─╔╠ė├▌å╩Į ÖC(j©®)Ų„╚╦╣½╦Š╠ß╣®ę╗šŠ╩ĮųŪ─▄ęŲäė(d©░ng)ŲĮ┼_(t©ói)ĮŌøQĘĮ░Ė
äō(chu©żng)Ø╔ĘĮų█ŽĄ┴ąĄū▒P░³║¼═Ļš¹│╔╩ņĖąų¬,šJ(r©©n)ų¬╝░Č©╬╗ī¦(d©Żo)║Į─▄┴”Ą─▌å╩ĮÖC(j©®)Ų„╚╦ŲĮ┼_(t©ói),ų┬┴”ė┌×ķĖ„ąąĖ„śI(y©©)╝Ü(x©¼)Ęų╩ął÷(ch©Żng)ųąĄ─╔╠ė├▌å╩ĮÖC(j©®)Ų„╚╦╣½╦Š╠ß╣®ę╗šŠ╩ĮųŪ─▄ęŲäė(d©░ng)ŲĮ┼_(t©ói)ĮŌøQĘĮ░Ė
-äō(chu©żng)Ø╔ĘĮų█ŽĄ┴ąÖC(j©®)Ų„╚╦Ąū▒PīŹ(sh©¬)¼F(xi©żn)7x24ąĪĢr(sh©¬)▀B└m(x©┤)╣żū„,▄ø╝■─ŻēK║═ė▓╝■─ŻēKų¦│ųūįį\öÓ║═╚▀ėÓ░▓╚½,═Ļš¹│╔╩ņĄ─Ėąų¬šJ(r©©n)ų¬║═Č©╬╗ī¦(d©Żo)║Į╣”─▄ĮM╝■
äō(chu©żng)Ø╔Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P,ų¦│ųČ■┤╬ķ_░l(f©Ī)╗“Č©ųŲ╗»Ę■äš(w©┤),▀M(j©¼n)Č°īŹ(sh©¬)¼F(xi©żn)Ę■äš(w©┤)ÖC(j©®)Ų„╚╦╔╠śI(y©©)╗»┬õĄž,═©▀^┤Ņ▌dözŽ±Ņ^ÖC(j©®)ąĄ▒█ņF╗»Ų„Ą╚╔Žīė╣”─▄─ŻēK,īŹ(sh©¬)¼F(xi©żn)┼õ╦═Ž¹ČŠĄ╚╣”─▄
äō(chu©żng)Ø╔╩ęā╚(n©©i)ÖC(j©®)Ų„╚╦ęŲäė(d©░ng)Ąū▒P╝»│╔ļŖ╠▌▀ē▌ŗ,ę╗µI║¶╠▌,ßśī”(du©¼)ÖC(j©®)Ų„╚╦ČÓśŪīėųŪ─▄┼õ╦═,Ž¹Üó,č▓ÖzĄ╚╔╠ė├Ę■äš(w©┤)ł÷(ch©Żng)Š░,▓óī”(du©¼)ł÷(ch©Żng)Š░▀M(j©¼n)ąąā×(y©Łu)╗»╠Ä└Ē,īŹ(sh©¬)¼F(xi©żn)Ė³ČÓ╔╠ė├ār(ji©ż)ųĄ
äō(chu©żng)Ø╔▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P▓╔ė├Š½╝Ü(x©¼)╗»ĄžłDśŗ(g©░u)Į©╝╝ąg(sh©┤),śŗ(g©░u)Į©│÷Ė▀Š½Č╚,└Õ├ū╝ē(j©¬)äeĄžłD,į┌Å═(f©┤)ļsČÓūāĄ─ł÷(ch©Żng)Š░Ž┬ę▓─▄ū÷ĄĮäė(d©░ng)æB(t©żi)ūR(sh©¬)äeŁh(hu©ón)Š│ųąĄ─╚╦╗“Ųõ╦¹šŽĄK╬’
SLAMĄžłDśŗ(g©░u)Į©Ą─▀^│╠Š═╩Ūė├╔ŅČ╚é„ĖąŲ„£y(c©©)┴┐ÖC(j©®)Ų„╚╦║═ų▄ć·Łh(hu©ón)Š│Ą─ŠÓļxą┼Žó,Å─Č°═Ļ│╔ī”(du©¼)ų▄▀ģŁh(hu©ón)Š│Ą─ĄžłDśŗ(g©░u)Į©,ÖC(j©®)Ų„╚╦Ģ■(hu©¼)ī”(du©¼)Łh(hu©ón)Š│▀M(j©¼n)ąąę╗ų┬ąįÖz▓ķ,ūŅĮK═Ļ│╔ĄžłD





