
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
į┌╚╦ŅÉĖąų¬╩└ĮńĄ─▀^│╠ųąŻ¼Ųż─wĄ─ČÓ─ŻæBĖąų¬×ķ╬ęéāĖą╩▄šµīŹĄ─╬’└Ē╩└Įń╠ß╣®┴╦ųžę¬Ą─╣żŠ▀ĪŻš²╚ń╚╦éāė├╩ųųĖė|├■╬┤ų¬Ą─╬’ŲĘŻ¼«öŠ▀ėąČÓ─ŻæBĖąų¬─▄┴”Ą─ÖCŲ„╚╦╩ų─”▓┴╬┤ų¬╬’ŲĘĢrŻ¼ÖCŲ„╚╦▒Ń─▄Ėąų¬ĄĮ╬’ŲĘĄ─┤ų▓┌Č╚Ż╗«öÖCŲ„╚╦╩ųĖ¶┐šĘ„▀^╬╗ų├╬’ŲĘĢrŻ¼╦³╔§ų┴─▄Ž±X╔õŠĆ║═3DÆ▀├Ķāx─ŪśėĖąų¬ĄĮ╬’ŲĘĄ─▓─┘|║═ą╬ĀŅĪŻę“┤╦Ż¼─▄ē“Ėąų¬ŁhŠ│Ą─ČÓ─ŻæBé„Ėą┼c╔├ķLĮ╗╗źĄ─▄ø¾wÖCŲ„╚╦Ą─ĮY║Ž▒ž╚╗─▄▓┴│÷╗╗©ĪŻ
ūŅą┬ę╗Ų┌ĪČŽ╚▀M╣”─▄▓─┴ŽĪĘŻ©Advanced Functional MaterialsŻ®ł¾Ą└┴╦▒▒Š®║Į┐š║Į╠ņ┤¾īWĘ┬╔·▄ø¾wÖCŲ„╚╦īŹ“×╩ęį┌╚ßąįé„ĖąŲ„┼c▄ø¾wÖCŲ„╚╦Ėąų¬ŅIė“Ą─ūŅą┬蹊┐ĪŻ
įōĒŚ╣żū„ķ_░l┴╦ę╗╠ūųŪ─▄▄ø¾wÖCŲ„╚╦ŽĄĮyŻ¼įōŽĄĮy─▄ē“ī”╬’¾wĄ─╬’└Ē╠žąį▀MąąĖąų¬Īó├Ķ╩÷║═ĘųŅÉŻ¼┐╔ģfų·ÖCŲ„╚╦ĮŌßī╬’└Ē╩└ĮńĪó┼c╬’└Ē╩└Įń▀MąąĮ╗╗źŻ¼×ķ╚╦╣żųŪ─▄┼c╩└ĮńĄ─Į╗╗ź╠ß╣®┴╦┐╔─▄Ą─Įė┐┌ĪŻ
«öŪ░蹊┐├µ┼RĄ─å¢Ņ}
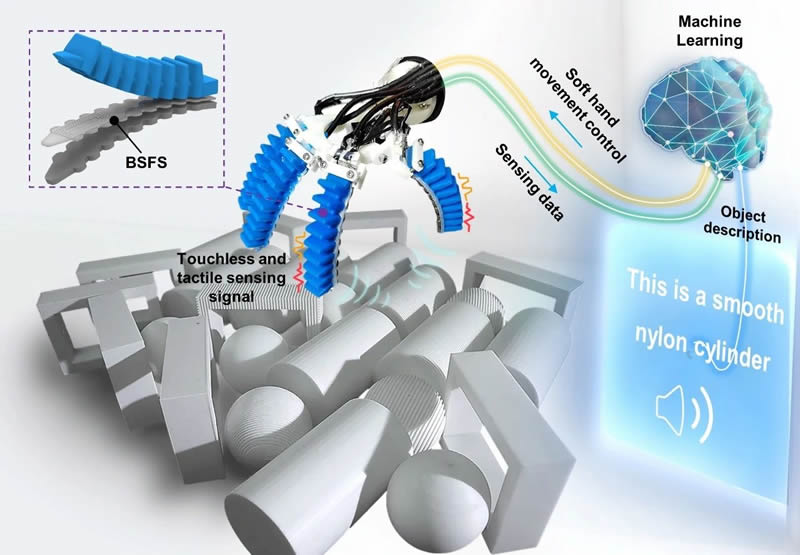
▄ø¾wÖCŲ„╚╦Š▀ėą┼c╔·ŠŃüĒĄ─░▓╚½¤oōp╠žąįŻ¼į┌Ė„ĘNīŹļHæ¬ė├ųąų▓Įš╣¼F│÷¬Ü╠žĄ─ā×ä▌ĪŻ╗∙ė┌ē║ļŖĪóē║ūĶĪóļŖ╚▌Īó─”▓┴ļŖĪó║═Š▐┤┼ÅŚąįą¦æ¬ķ_░lĄ─┤¾┴┐╚ßąįé„ĖąŲ„Ż¼─▄ē“┘xėĶ▄ø¾wÖCŲ„╚╦Ėąų¬─▄┴”Ż¼Ą½╦³éāĄ─å╬ę╗ūRäe─ŻæB¤oĘ©ØMūŃÖCŲ„╚╦╚½ĘĮ├µųŪ─▄Ą─ę¬Ū¾ĪŻ▄ø¾wÖCŲ„╚╦Ż¼╠žäe╩Ū▄ø¾wÖCŲ„╚╦╩ųŻ¼ąĶę¬ŅÉ╦Ųė┌╚╦ŅÉ╩ų▓┐Ą─ČÓ─ŻæBą┼ŽóĖąų¬║═├Ķ╩÷─▄┴”ĪŻ×ķ┴╦öU┤¾▄ø¾wÖCŲ„╚╦Ą─īŹļHæ¬ė├ĘČć·Ż¼ķ_░lĖ▀ąį─▄ČÓ─ŻæB╚ßąįé„ĖąŲ„║═╝»│╔ÖCŲ„īW┴ĢĄ─ųŪ─▄▄ø¾wÖCŲ„╚╦ŽĄĮyä▌į┌▒žąąĪŻ
Ų∙Į±×ķų╣Ż¼╚╦éāęčĮø×ķķ_░lČÓ─ŻæB╚ßąįé„ĖąŲ„ū÷│÷┴╦įSČÓ┼¼┴”Ż¼╚╗Č°į┌Ęųļx║═ĮŌ±ŅĖ„ĘN┤╠╝żŅÉą═Ą─ą┼╠¢ĘĮ├µ╚į┤µį┌╠¶æĪŻļm╚╗蹊┐╚╦åTę╗ų▒ų┬┴”ė┌ķ_░lŠ▀ėąČÓ─ŻæB╚ßąįé„ĖąŲ„Ą─ųŪ─▄ÖCŲ„╚╦ęįĖąų¬Ė„ĘNŁhŠ│ą┼ŽóŻ¼╚╗Č°Ż¼─┐Ū░Ą─ųŪ─▄ÖCŲ„╩ų╚▒Ę”╚½├µĄ─ČÓ─ŻæBą┼ŽóĖąų¬Ż¼ė╚Ųõ╩Ūī”▒Ē├µ╬’└Ē╠žąįĄ─├Ķ╩÷─▄┴”ĪŻ▀@ą®ŠųŽ▐ąį×ķ▄ø¾wÖCŲ„╩ų▀Mę╗▓ĮĖąų¬ČÓ─ŻæBŁhŠ│ą┼Žó║═ł╠ąąŠ½╝Ü▓┘ū„╚╬äšįņ│╔┴╦ūĶĄKĪŻ
ĮYśŗ║åå╬Ą─ļp─ŻæBūį╣®ļŖ╚ßąįé„ĖąŲ„
蹊┐łFĻĀčą░l┴╦ę╗ĘN╗∙ė┌─”▓┴╝{├ū░lļŖÖC║═Š▐┤┼ą¦æ¬Ą─ļp─ŻæBūį╣®ļŖ╚ßąįé„ĖąŲ„Ż©BSFSŻ®ĪŻBSFSĮYśŗ║åå╬Ż¼ė╔┤┼ÅŚąįī¦ļŖ▒Ī─ż║═ĘŌčbĄ─ę║æBĮī┘ŠĆ╚”ĮM│╔Ż¼┐╔ęįį┌10║┴├ļĄ─Ēææ¬Ģrķgā╚Š½┤_Öz£y║═ĮŌ±ŅĮėė|║═ĘŪĮėė|ļp─ŻæBą┼╠¢ĪŻ
蹊┐łFĻĀį┌╣Ķ─z▓─┴ŽųąōĮ╚ļ╬ó┤┼¾w║═╠╝╝{├ū╣▄Ż¼ųŲéõŠ▀ėąČÓ┐ūĮYśŗĄ─┤┼ÅŚąįī¦ļŖ▒Ī─żĪŻļS║¾Ż¼╩╣ė├┤┼╗»āxī”┤┼ÅŚąįī¦ļŖ▒Ī─ż▀Mąą┤┼╗»Ż¼╩╣╬ó┤┼¾wųžą┬Č©Ž“Ż¼╚╗║¾ėĪ╦ó▓óė├╣Ķ─zĘŌčbę║æBŠĆ╚”ĪŻ╦∙ėąĮM╝■Č╝╩Ūė╔╚ßąį▓─┴ŽųŲ│╔Ą─Ż¼ę“┤╦BSFSš¹¾wĮYśŗ╚ß▄ø┐╔ūāą╬ĪŻ┤┼ÅŚąįī¦ļŖ▒Ī─ż▀Ć▒Ē¼F│÷’@ų°Ą─┤┼ÅŚąįĪŻ

 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ Ž¹ČŠÖCŲ„╚╦ārĖ± š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ║╦╦ß▓╔śėÖCŲ„╚╦ ÖCŲ„╚╦┤·╣żÅS ųŪ─▄┼õ╦═ÖCŲ„╚╦ ćŖņFŽ¹ČŠÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ Ž¹ÜóÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


