
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
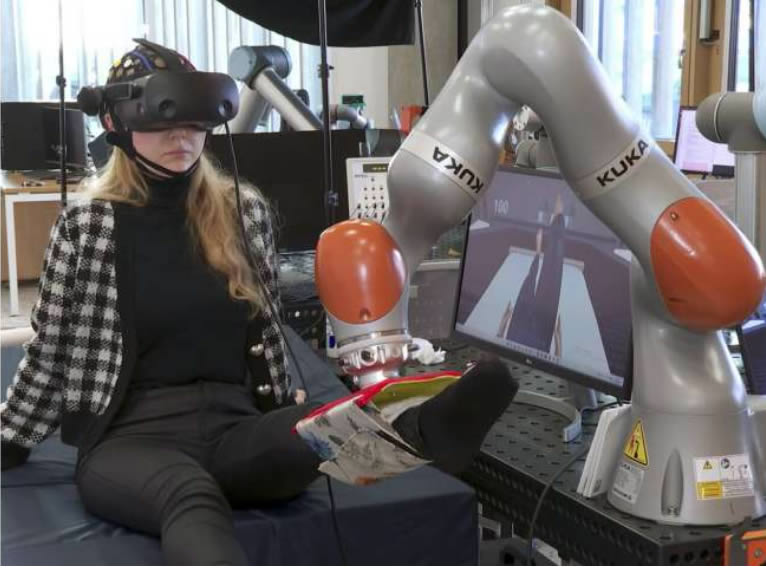
SkoltechĄ─蹊┐╚╦åTįO(sh©©)ėŗ(j©¼)┴╦ę╗ĘNą┬Ą─ĘĮĘ©Ż¼ė├ė┌╩▄é¹╗“ųą’L(f©źng)║¾Ą─═╚▓┐┐ĄÅ═(f©┤)Ż¼įōĘĮĘ©╩╣ė├─X-ÖC(j©®)Įė┐┌Ż¼▓ó═©▀^Ųż─wī”╝╣ų∙▀M(j©¼n)ąąļŖ┤╠╝żĪŻįōĘĮ░ĖĮY(ji©”)║Ž┴╦╠ōöM¼F(xi©żn)īŹ(sh©¬)╝╝ąg(sh©┤)Ż¼═©▀^ųžą┬Į©┴ó▀\(y©┤n)äė║═ęŌłDų«ķgĄ─┬ō(li©ón)ŽĄŻ¼░c»ł╗╝š▀─▄ē“ųžą┬┐žųŲŽ┬ų½▓óšŲ╬šūį╚╗▀\(y©┤n)äėĪŻ
1 蹊┐▒│Š░
╚½╩└ĮńöĄ(sh©┤)░┘╚f╚╦ę“╝╣╦Ķōpé¹║═ųą’L(f©źng)Č°│÷¼F(xi©żn)ĖąėXĪó▀\(y©┤n)äė╗“šJ(r©©n)ų¬╣”─▄šŽĄKĪŻ╔±Įø(j©®ng)ŽĄĮy(t©»ng)Ą─╗ųÅ═(f©┤)ėąįSČÓŽ▐ųŲŻ¼╩╣┤¾ČÓöĄ(sh©┤)é„Įy(t©»ng)Ą─ßt(y©®)»¤ĘĮĘ©¤oą¦ĪŻ╔±Įø(j©®ng)Įė┐┌║═╔±Įø(j©®ng)┤╠╝ż╝╝ąg(sh©┤)Ą╚ą┬Ą─╔±Įø(j©®ng)╝╝ąg(sh©┤)┐╔─▄Ģ■ÅžĄūĖ─ūā╔±Įø(j©®ng)╝▓▓ĪĄ─┐ĄÅ═(f©┤)│╠ą“ĪŻįō蹊┐╠ß│÷┴╦ę╗ĘNą┬Ą─ĘĮĘ©üĒ┐ĄÅ═(f©┤)ė╔ųą’L(f©źng)╗“╝╣╦Ķōpé¹ę²ŲĄ─Ž┬ų½ōpé¹Ż¼▓óŪęķ_░l(f©Ī)┴╦ę╗éĆĦėąBCIŽĄĮy(t©»ng)║═¬Ü(d©▓)╠žÖC(j©®)Ų„╚╦ų·╩ųĄ─╠ōöMŁh(hu©ón)Š│ĪŻčąŠ┐╚╦åT═©▀^┼R┤▓įć“×(y©żn)š╣╩Š┐ĄÅ═(f©┤)ĘĮĘ©Ą─╣żū„įŁą═ĪŻ
2 蹊┐ā╚(n©©i)╚▌
蹊┐ĘĮ░ĖŻ║
ųą’L(f©źng)║¾Ą─╗╝š▀Ż¼ęį╝░į┌─│ĘN│╠Č╚╔ŽĮø(j©®ng)Üv▀^╝╣╦Ķäō(chu©żng)é¹Ą─╗╝š▀Įø(j©®ng)│ŻąĶę¬▀M(j©¼n)ąą┐ĄÅ═(f©┤)ė¢(x©┤n)ŠÜŻ¼įćłDųžą┬▀BĮė┤¾─XųąęŲäė╗╝ų½Ą─ęŌłD║═īŹ(sh©¬)ļHĄ─╝Ī╚Ō▀\(y©┤n)äėĪŻįō蹊┐łF(tu©ón)ĻĀ(du©¼)įO(sh©©)ėŗ(j©¼)┴╦ę╗éĆ╝»ęįŽ┬╦∙ėą╣”─▄ė┌ę╗╔ĒĄ─ė¢(x©┤n)ŠÜŽĄĮy(t©»ng)Ż║ę╗éĆ╠ōöM¼F(xi©żn)īŹ(sh©¬)Č·ÖC(j©®)Ż¼╦³─▄┤┘╩╣╗╝š▀│»ų°╠ōöM─┐ś╦(bi©Īo)░l(f©Ī)Ų═╚▓┐▀\(y©┤n)äėŻ¼▓ó«a(ch©Żn)╔·¬Ü(d©▓)┴ó▀\(y©┤n)äėĄ─ÕeėXŻ╗ę╗éĆ╔±Įø(j©®ng)Įė┐┌Ż¼╦³─▄ėøõø╗╝š▀Ą─▀\(y©┤n)äėęŌłDŻ╗ę╗éĆÖC(j©®)Ų„╚╦Ż¼ė╔ė┌╬ęéāūį╝║Ą─▄ø╝■Ż¼╦³─▄ęįūį╚╗Ą─ĘĮ╩ĮęŲäė═╚▓┐║═╝╣╦ĶĄ─Įø(j©®ng)ŲżļŖ┤╠╝żŻ¼┤ų┬įĄžšfŻ¼▀@Ģ■Ę┼┤¾üĒūį┤¾─XĄ─ą┼╠¢ĪŻ
1Īó─XÖC(j©®)Įė┐┌Ż║╔±Įø(j©®ng)Įė┐┌╩Ū▀BĮėĄĮ╔±Įø(j©®ng)ŽĄĮy(t©»ng)Īóūx╚Ī║═ĮŌ┤aŲõ╗Ņäė▓óŽ“═Ō▓┐▌oų·įO(sh©©)éõ▌ö│÷ą┼╠¢Ą─įO(sh©©)éõŻ¼╚ń═Ō╣Ū„└║═╝┘ų½Ż¼į┌░c»łĢr╗ųÅ═(f©┤)╗Ņäė─▄┴”ĪŻ┤¾─XĄ─┐╔╦▄ąįį┌╔±Įø(j©®ng)į┘╔·ųąŲų°ĻP(gu©Īn)µIū„ė├ĪŻ╔±Įø(j©®ng)Įė┐┌┐╔ė├ė┌ģf(xi©”)š{(di©żo)┼cćLįćåóäėūįų„▀\(y©┤n)äėŽÓĻP(gu©Īn)Ą─╔±Įø(j©®ng)į¬╗Ņäė║═ė╔▌oų·įO(sh©©)éõ╣żū„«a(ch©Żn)╔·Ą─é„╚ļą┼╠¢ĪŻčąŠ┐╚╦åTįO(sh©©)ėŗ(j©¼)┴╦ę╗éĆ╠ōöMŁh(hu©ón)Š│Ż¼ę¬Ū¾╚╦éāŅA(y©┤)£y░c»ł═╚į┌─┐ś╦(bi©Īo)┤╔┤uĘĮŽ“╔ŽĄ─▀\(y©┤n)äėĪŻ─XļŖłDŻ©EEGŻ®į┌ßt(y©®)ė├╝ēNVX-36Ę┼┤¾Ų„ųąūóāįĪŻBCI▓╔ė├P300ĘČ╩ĮĪŻ
2ĪóÖC(j©®)Ų„╚╦▌oų·ų╬»¤Ż║Ž┬ų½ōpé¹Ą─ś╦(bi©Īo)£╩(zh©│n)┐ĄÅ═(f©┤)ĘĮ░Ėę└┘ćė┌ßt(y©®)╔·▀M(j©¼n)ąąĄ─╬’└Ēų╬»¤ŠÜ┴Ģ(x©¬)ĪŻ▀@ĘNĘĮĘ©▓╗į╩įSBCI║══╚▓┐▀\(y©┤n)äė═¼▓ĮĪŻčąŠ┐╚╦åTķ_░l(f©Ī)┴╦ę╗ĘN╠ž╩ŌĄ─ÖC(j©®)Ų„╚╦Ż¼┐╔ęį─ŻĘ┬ūį╚╗ąąū▀─Ż╩ĮęŲäė╗╝š▀Ą─═╚ĪŻKUKA LBR iiwa 14 R820Ż©KUKA LBR-iiwaŻ®ÖC(j©®)Ų„╚╦╩ų▒█╩╣ė├KUKAĄ─Sunrise WorkbenchŲĮ┼_╝░ŲõJava APIŠÄ│╠ĪŻįōÖC(j©®)Ų„┼c╚╦-ÖC(j©®)Ų„╚╦ģf(xi©”)ū„╝µ╚▌Ż¼┐╔ęį░▓╚½Ąžė├ė┌╚╦ŅÉ┐ĄÅ═(f©┤)▀^│╠ĪŻKUKA LBR iiwaėąŲ▀éĆ▌SŻ¼├┐éĆĻP(gu©Īn)╣Ø(ji©”)Č╝┼õėą┼żŠžé„ĖąŲ„║═╬╗ų├é„ĖąŲ„ĪŻ│²┴╦ÖC(j©®)Ų„╚╦╩ų▒█Ą─╬╗ų├┐žųŲų«═ŌŻ¼é„ĖąŲ„öĄ(sh©┤)ō■(j©┤)▀Ćį╩įSūĶ┐╣┐žųŲĪŻĖ▀Š½Č╚Ą─é„ĖąŲ„öĄ(sh©┤)ō■(j©┤)║═Ė▀▀_(d©ó)1kHzĄ─Ė³ą┬Ņl┬╩╩╣ÖC(j©®)Ų„╚╦─▄ē“?q©▒)”╠Ä└Ē┴”ū÷│÷┐ņ╦┘Ę┤æ?y©®ng)Ż¼▓ó╩╣Ųõ▀m║Ž┼c╚╦ŅÉĮ╗╗źĪŻ
3ĪóĮø(j©®ng)Ųż╝╣╦ĶļŖ┤╠╝żŻ║Įø(j©®ng)Ųż╝╣╦ĶļŖ┤╠╝żęčį┌įSČÓŽ╚Ū░Ą─蹊┐ųą’@╩Š│÷▌^║├Ą─ų╬»¤ĮY(ji©”)╣¹ĪŻtSCS╩Ū═©▀^īóļŖśOČ©╬╗į┌ūĄ╣ŪT11-T12Ą─╝¼═╗ų«ķgĪóĻ¢śOŻ©╬╗ė┌„─╣ŪĒö▓┐╔ŽĘĮŻ®ĪóŅl┬╩×ķ30 HzĄ─ļpśO╗“å╬śO├}ø_Ż©ęį5 HzĄ─Ņl┬╩š{(di©żo)ųŲŻ®üĒł╠(zh©¬)ąąĄ─ĪŻįō┤╠╝ż┼cÖC(j©®)Ų„╚╦ų·╩ų▀M(j©¼n)ąąĄ─═╚Ą─▀\(y©┤n)äė═¼▓Į╩®╝ėĪŻ
ė¢(x©┤n)ŠÜ│╠ą“Ż║┐ĄÅ═(f©┤)ė¢(x©┤n)ŠÜŲ┌ķgŻ¼╗╝š▀╠╔į┌┤▓╔ŽŻ¼░c»łĄ─═╚▒╗Ę┼į┌KUKA LBR iiwaĄ─ų¦╝▄╔ŽĪŻ╗╝š▀╩╣ė├╠ōöM¼F(xi©żn)īŹ(sh©¬)Č·ÖC(j©®)Ż¼▓óį┌╠ōöM¼F(xi©żn)īŹ(sh©¬)ųą▀M(j©¼n)ąą┐ń▓ĮŠÜ┴Ģ(x©¬)ĪŻ─XļŖš²į┌▒╗ėøõø║═ĮŌ┤aęįė├ė┌BCIæ¬(y©®ng)ė├ĪŻį┌╠ōöM¼F(xi©żn)īŹ(sh©¬)ųą╗╝š▀ė^▓ņĄĮūį╝║šŠį┌ę╗ēKėą┴∙ēK▓╗═¼┤╔┤uĄ─Ąž░ÕŪ░Ż¼ę¬Ū¾╗╝š▀▓╚Ųõųąę╗éĆĪŻ×ķ┴╦▀M(j©¼n)ąą▀\(y©┤n)äėŻ¼ųĖī¦(d©Żo)╗╝š▀īóūóęŌ┴”╝»ųąį┌╦∙ąĶĄ─┤╔┤u╔Ž▓óŽļŽ¾▀\(y©┤n)äėĪŻę╗Ą®BCIÖz£yĄĮ╗╝š▀Ą─ęŌłDŻ¼ÖC(j©®)Ų„╚╦Š═Ģ■åóäė▀\(y©┤n)äė│╠ą“ĪŻį┌╠ōöM¼F(xi©żn)īŹ(sh©¬)ųąŻ¼╗╝š▀į┌ø]ėąÖC(j©®)Ų„╚╦▌oų·Ą─ŪķørŽ┬ė^▓ņ╦¹Ą─═╚į┌ęŲäėŻ¼┤╦Ģræ¬(y©®ng)ė├tSCSŻ¼═¼▓Įåóäė┼cūįų„▀\(y©┤n)äėŽÓĻP(gu©Īn)Ą─╔±Įø(j©®ng)į¬╗Ņäė║═▌oų·įO(sh©©)éõ╣żū„«a(ch©Żn)╔·Ą─é„╚ļą┼╠¢ĪŻ
4 蹊┐ĮY(ji©”)šō
▒ŠčąŠ┐╠ß│÷┴╦ę╗ĘNą┬Ą─Ž┬ų½┐ĄÅ═(f©┤)ė¢(x©┤n)ŠÜĘĮĘ©Ż¼ķ_░l(f©Ī)┴╦ę╗ĘNė╔BCI┐žųŲĪó┤┘▀M(j©¼n)░c»ł═╚▀\(y©┤n)äėĄ─ÖC(j©®)Ų„╚╦▌oų·Ų„Š▀ĪŻįōŽĄĮy(t©»ng)─▄ē“═¼▓Į┼cåóäėūįų„▀\(y©┤n)äėĄ─ćLįćŽÓĻP(gu©Īn)┬ō(li©ón)Ą─╔±Įø(j©®ng)į¬╗Ņäė║═ė╔▌oų·čbų├Ą─äėū„«a(ch©Żn)╔·Ą─é„╚ļą┼╠¢ĪŻ×ķ┴╦į┌▀@ĘNÕæ¤ÆŲ┌ķgų¦│ų╔±Įø(j©®ng)┐ĄÅ═(f©┤)Ż¼æ¬(y©®ng)ė├Įø(j©®ng)Ųż╝╣╦ĶļŖ┤╠╝żĪŻČÓĘN╝╝ąg(sh©┤)Ą─ĮY(ji©”)║Žėą═¹│╔×ķ╗ųÅ═(f©┤)ųą’L(f©źng)╗“╝╣╦Ķōpé¹ī¦(d©Żo)ų┬Ą─Ž┬ų½ōpé¹Ą─ėąą¦ĘĮĘ©ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäėÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ Ž¹ČŠÖC(j©®)Ų„╚╦ārĖ± š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ║╦╦ß▓╔śėÖC(j©®)Ų„╚╦ ÖC(j©®)Ų„╚╦┤·╣żÅS ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ćŖņFŽ¹ČŠÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäėŽ¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_ÖC(j©®)Ų„╚╦ Ž¹ÜóÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |


