
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
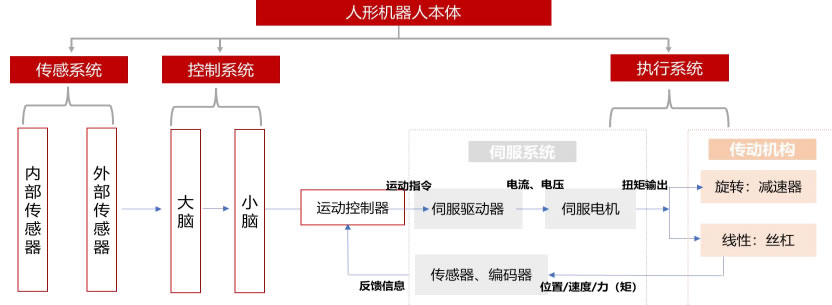
ę╗Īóé„ĖąŽĄĮy(t©»ng)ī”æ¬(y©®ng)Ī░╬Õ╣┘Ī▒Ż¼░³║¼ā╚(n©©i)▓┐é„ĖąŲ„║══Ō▓┐é„ĖąŲ„ĪŻā╚(n©©i)▓┐é„ĖąŲ„ų„ę¬ė├üĒÖz£yÖC(j©®)Ų„╚╦▒Š╔ĒĄ─ĀŅæB(t©żi)Ż¼×ķÖC(j©®)Ų„╚╦Ą─▀\(y©┤n)äė┐žųŲ╠ß╣®▒žę¬Ą─▒Š¾wĀŅæB(t©żi)ą┼ŽóŻ¼╚ńĖ„ĻP(gu©Īn)╣Ø(ji©”)Ą─╬╗ų├Īó╦┘Č╚Īó╝ė ╦┘Č╚Ą╚Ż¼▓óīó╦∙£yĄ├Ą─ą┼Žóū„×ķĘ┤üą┼╠¢╦═ų┴é„ĖąŲ„Ż¼ą╬│╔ķ]Łh(hu©ón)┐žųŲŻ¼ų„ę¬ėą╬╗ų├é„ĖąŲ„Īó╦┘ Č╚é„ĖąŲ„Ą╚ĪŻ═Ō▓┐é„ĖąŲ„ätė├üĒĖąų¬ÖC(j©®)Ų„╚╦╦∙╠ÄĄ─╣żū„Łh(hu©ón)Š│╗“╣żū„ĀŅørą┼ŽóŻ¼╩╣ÖC(j©®)Ų„╚╦Ą─äėū„ ▀mæ¬(y©®ng)═ŌĮńŪķørĄ─ūā╗»Ż¼▀_(d©ó)ĄĮĖ³Ė▀īė┤╬Ą─ūįäė╗»Ż¼╠ßĖ▀ÖC(j©®)Ų„╚╦Ą─╣żū„Š½Č╚Ż¼│ŻęŖėąęĢėXé„ĖąŲ„Īó ė|ėXé„ĖąŲ„Ą╚ĪŻ
Č■Īó┐žųŲŽĄĮy(t©»ng)ī”æ¬(y©®ng)Ī░┤¾─XĪ▒║═Ī░ąĪ─XĪ▒Ż¼╩ŪÖC(j©®)Ų„╚╦Ą─ųĖō]ųąśąĪŻĪ░┤¾─XĪ▒žō(f©┤)ž¤(z©”)Łh(hu©ón)Š│Ėąų¬Īóąą ×ķ┐žųŲĪó╚╦ÖC(j©®)Į╗╗źŻ¼═©▀^╔ŅČ╚īW(xu©”)┴Ģ(x©¬)║═ AI ╝╝ąg(sh©┤)Ż¼īŹ(sh©¬)¼F(xi©żn)ūįų„īW(xu©”)┴Ģ(x©¬)║═ųŪ─▄øQ▓▀ĪŻĪ░ąĪ─XĪ▒ätžō(f©┤)ž¤(z©”)▀\(y©┤n)äė ┐žųŲ░³└©▀\(y©┤n)äėęÄ(gu©®)äØĪóū╦æB(t©żi)┐žųŲĪóäėæB(t©żi)ŲĮ║ŌĄ╚Ż¼═©▀^īŹ(sh©¬)ĢrĖąų¬ÖC(j©®)Ų„╚╦Ą─ĀŅæB(t©żi)║═Łh(hu©ón)Š│ą┼ŽóŻ¼ąĪ─X┐╔ ęįš{(di©żo)š¹ÖC(j©®)Ų„╚╦Ą─äėū„Ż¼╩╣Ųõ─▄ē“ĘĆ(w©¦n)Č©Ąžąąū▀Īó┼▄▓ĮĪó╠°▄SĄ╚ĪŻ┐žųŲŽĄĮy(t©»ng)žō(f©┤)ž¤(z©”)╠Ä└Ēū„śI(y©©)ųĖ┴Ņą┼ŽóĪó ā╚(n©©i)═ŌŁh(hu©ón)Š│ą┼ŽóŻ¼▓óę└ō■(j©┤)ŅA(y©┤)Č©Ą─▒Š¾w─Żą═ĪóŁh(hu©ón)Š│─Żą═║═┐žųŲ│╠ą“ū÷│÷øQ▓▀Ż¼«a(ch©Żn)╔·ŽÓæ¬(y©®ng)Ą─┐žųŲą┼╠¢Ż¼ ═©▀^“ī(q©▒)äėŲ„“ī(q©▒)äėł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)Ą─Ė„éĆĻP(gu©Īn)╣Ø(ji©”)░┤╦∙ąĶĄ─Ēśą“Īó┤_Č©Ą─▄ē█E▀\(y©┤n)äėŻ¼═Ļ│╔╠žČ©Ą─ū„śI(y©©)ĪŻ
╚²Īół╠(zh©¬)ąąŽĄĮy(t©»ng)ī”æ¬(y©®ng)Ī░ų½¾wĪ▒Ż¼žō(f©┤)ž¤(z©”)ł╠(zh©¬)ąą┐žųŲŽĄĮy(t©»ng)ųŲČ©Ą─▓┘ū„ĪŻĪ░ÖC(j©®)Ų„ų½Ī▒ųĖĘ┬╚╦ÖC(j©®)ąĄ▒█Īóņ` Ū╔╩ųĪó═╚ūŃĄ╚Ż¼Ī░ÖC(j©®)Ų„¾wĪ▒ųĖ╣Ū„└Īó▒Š¾wĮY(ji©”)śŗ(g©░u)Ą╚ĪŻł╠(zh©¬)ąąŽĄĮy(t©»ng)Ą─╣żū„┴„│╠╚ńŽ┬łD╦∙╩ŠŻ¼╔µ╝░ĄĮ╦┼Ę■ŽĄĮy(t©»ng)║═ł╠(zh©¬)ąąÖC(j©®)śŗ(g©░u)Ż║╦┼Ę■ŽĄĮy(t©»ng)╩Ū─▄Ė∙ō■(j©┤)ųĖ┴Ņą┼╠¢Š½┤_Ąž┐žųŲł╠(zh©¬)ąą▓┐╝■Ą─▀\(y©┤n)äė╦┘Č╚┼c╬╗ų├Ą─“ī(q©▒)äė ŽĄĮy(t©»ng)Ż¼ę╗░Ń╦┼Ę■ŽĄĮy(t©»ng)ė╔║╦ą─┴Ń▓┐╝■ļŖÖC(j©®)Īó“ī(q©▒)äėŲ„║═é„ĖąŲ„/ŠÄ┤aŲ„ĮM│╔Ż╗é„äėÖC(j©®)śŗ(g©░u)╩Ū░čäė┴”Å─ ÖC(j©®)Ų„Ą─ę╗▓┐Ęųé„▀fĄĮ┴Ēę╗▓┐ĘųŻ¼īŹ(sh©¬)¼F(xi©żn)Ė─ūāäė┴”ÖC(j©®)▌ö│÷▐D(zhu©Żn)Šž╗“š▀Ė─ūāŲõ▀\(y©┤n)äėĘĮ╩ĮŻ©ą²▐D(zhu©Żn)▀\(y©┤n)╣”║═ų▒ ŠĆ▀\(y©┤n)äėĄ─▐D(zhu©Żn)ōQŻ®Ż¼ÖC(j©®)ąĄé„äėĘų×ķā╔ŅÉŻ¼ę╗╩Ū┐┐ÖC(j©®)╝■ķgĄ──”▓┴┴”é„▀fäė┴”┼c─”▓┴é„äėŻ¼Č■╩Ū┐┐ų„ äė╝■┼cÅ─äė╝■ć¦║Ž╗“ĮĶų·ųąķg╝■ć¦║Žé„▀fäė┴”╗“▀\(y©┤n)äėĄ─ć¦║Žé„äėŻ¼Ąõą═ÖC(j©®)śŗ(g©░u)ėą£p╦┘Ų„ĪóĮzĖ▄Īó ╬ü▌å╬üŚUé„äėŚUĄ╚ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäėÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖC(j©®)Ų„╚╦ Ž¹ČŠÖC(j©®)Ų„╚╦ārĖ± š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P ║╦╦ß▓╔śėÖC(j©®)Ų„╚╦ ÖC(j©®)Ų„╚╦┤·╣żÅS ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ćŖņFŽ¹ČŠÖC(j©®)Ų„╚╦ łDĢ°^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäėŽ¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |


