

Š▀ėą3ūįė╔Č╚ą²▐D▀\äė─▄┴”Ą─═¾ĻP╣ØįOėŗ┐╔ęį╚╬ęŌČ©╬╗Ųõ─®Č╦ł╠ąąŲ„ĪŻ╚╦ŅÉĄ─╩ų═¾Š═ėą3ūįė╔Č╚▀\äėĄ──▄┴”Ż¼3ūįė╔Č╚╚╦╣ż╩ų═¾į┌─│ą®ĘĮ├µā×ė┌╚╦ŅÉĄ─╩ų═¾Ż¼╚ń▀\äėĘČć·╗“┼żŠž▌ö│÷ĪŻ▒M╣▄ę╗ą®╝┘ų½į┌įOėŗųą╝ė╚ļ┴╦3ūįė╔Č╚╩ų═¾Ż¼Ą½┤«ąą3ūįė╔Č╚╩ų═¾įOéõį┌ÖCŲ„╚╦æ¬ė├ųąĖ³Ųš▒ķĪŻ
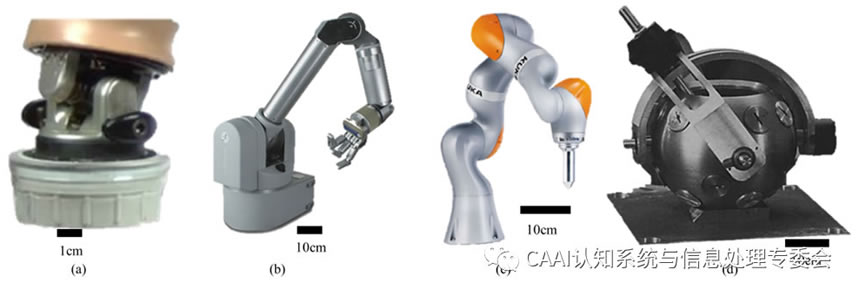
łD3 ╚²ūįė╔Č╚╩ų═¾ (a) MC MultiFlex(RU) (b) Barrett W AM Arm (RRR) (c) Kuka LBR iiwa (RRR) (d) ChirikjianŪ“ą╬▓Į▀MļŖÖC(S)
▒╗äė┤«ąą3ūįė╔Č╚Ż║│²┴╦─Ūą®║åå╬ĮM║Ž¼FėąĄ─å╬ūįė╔Č╚╝┘¾w═¾▓┐ų«═ŌŻ¼║▄╔┘ėą3ūįė╔Č╚▒╗äė═¾▓┐┤µį┌Ż¼╚╗Č°Ż¼MC Multiflex[łD2(a)]╩╣ė├┴╦ę╗éĆĦėąÅŚąįŲ½ų├UĻP╣ØĄ─å╬ūįė╔Č╚ą²▐DŲ„Ż¼ą╬│╔┴╦ę╗éĆRUµ£Ż¼įOėŗŅÉ╦Ųė┌MC Flexion═¾▓┐ĪŻ
ų„äė┤«┬ō3ūįė╔Č╚Ż║īŹ¼F3ūįė╔Č╚ų„äė▀\äė│ŻęŖĄ─ĘĮĘ©╩Ūīóų„äėą²▐DŲ„┤«┬ō▓╝ų├Ż¼▌SŠĆį┌▓╗═¼ĘĮŽ“╔ŽŻ¼▀@ĘNĘĮĘ©▒╗ė├ė┌ą▐Å═ąg║═ÖCŲ„╚╦╝╝ągĪŻė╔╝s║▓Īż╗¶ŲšĮ╦╣┤¾īWæ¬ė├╬’└ĒīŹ“×╩ęįOėŗĄ──ŻēK╗»╝┘ų½Ż¼╩╣ė├┴╦ę╗éĆ╬╗ė┌ą²Ū░Ą─ą²▐DŲ„Ż¼ęį╝░ā╔éĆŽÓ═¼Ą─ļŖäėå╬į¬┤«┬ōĘ┼ų├Ż¼╦³éāų«ķgėą90Č╚Ą─Ų½ęŲŻ¼ė├ė┌ÅØŪ·║═Ų½ęŲĪŻ
┤«ąąRRRĘĮĘ©į┌╣żśIÖCąĄ▒█æ¬ė├ųąĘŪ│ŻŲš▒ķĪŻįSČÓ╔╠ė├╣żśI╬õŲ„Ż¼╚ńKuka k -16Īó┤©ŲķkŽĄ┴ąĪó░l─Ū┐ŲMŽĄ┴ąĪóDurrEcoPaintĪó°Ö║Ż/ Foxconnrobot arms║═░═└ū╠žWAM[łD2(b)]ĪŻ▀@╚²éĆĻP╣ØĄ─▌Sį┌ę╗éĆ╣▓═¼³c╔ŽŽÓĮ╗Ū“ą╬─®Č╦ł╠ąąŲ„▀\äėŻ¼▓ó×ķÖCŲ„╚╦╩ų▒█Ė³Į³Č╦Ą─ĻP╣Ø╠ß╣®ŲĮęŲ▀\äė┼cŪ“ą╬╩ų═¾▀\äėĮŌ±ŅĪŻ«öā╔éĆĪ░ØLĪ▒▌S╣▓ŠĆĢrŻ¼▀@ĘNįOėŗ│Ż│Żī¦ų┬į┌┴Ń╬╗ų├│÷¼FŲµ«É³cĪŻ╚╗Č°Ż¼į┌░³čb╝s╩°Ą─▀\äėĘČć·║═ņ`╗Ņąį(▌üļŖÖC║═²X▌åŽĄ┐╔ęįĘ┼ų├▀hļxą²▐Dųąą─)╩╣▀@ĘN┼õų├╬³ę²║═▀m║Ž╣żśI╬õŲ„ĪŻę¬ūóęŌĄ─╩ŪŻ¼▀@ą®▒█ā╚Ą─Ė®č÷║═Ųõųąę╗éĆØL▐DĮŪ═©│Ż╩Ū═©▀^éŃ²X▌å▓Ņ╦┘Ų„“īäėĄ─Ż¼▀@╩╣Ą├ļŖÖC┐╔ęįčžų°═¾ĻP╣ØĄ─┐vŽ“Ę┼ų├Ż¼╣Ø╩Ī┐šķgŻ¼▓ó┐╔─▄£p╔┘▐DäėæT┴┐ĪŻØL-ś¬-ØLįOėŗę▓ė├ė┌ŅÉ╚╦ÖCŲ„╚╦Īóė├ė┌ąląŪĘ■䚥─ÖCŲ„╚╦╩ų▒█║══Ō┐ŲÖCŲ„╚╦╩ų═¾Ż¼┤·╠µ╩╣ė├Ą┌Č■┴ąØLäėĻP╣ØŻ¼ę╗ą®╩ų═¾įOėŗīŹ¼F3ūįė╔Č╚Ą─▀\äė═©▀^ØLäė-āAą▒-Ų½║Į┼õų├ĪŻį┌▀@ĘNŪķørŽ┬Ż¼Ų½║Į▌S┤╣ų▒ė┌ÖMōu▌S║═Ė®č÷▌SŻ¼ī”æ¬ė┌╚╦╩ų═¾Ą─ÅĮŽ“Ų½▓ŅĪŻ«öŲ½║Į▌S┼cĖ®č÷▌S║═ØL▐D▌SŽÓĮ╗ĢrŻ¼įōÖCśŗ═©│Ż▒╗šJ×ķ╩Ūę╗éĆŪ“ą╬═¾ĻP╣ØŻ¼ę▓┐╔ęį▒╗šJ×ķ╩Ūę╗éĆRUµ£ĪŻ│²┴╦╩ųąg▒█║═╣żśI▒█Ż¼ę“×ķØL-ØL-ØL╩ų═¾┼c╚╦Ą─╩ų═¾ŽÓ╦ŲŻ¼╦∙ęįę▓Įø│Żė├ė┌╚╦ą╬╗“öM╚╦╗»ÖCąĄ▒█ĪŻę╗ą®ŽĄ┴ą═¾įOėŗ▀xō±╩╣ė├å╬ę╗Ą─Ū“ĻP╣ØČ°▓╗╩Ū┤«ąąµ£Ż¼ļm╚╗š¹¾wÄū║╬ą╬ĀŅ╩Ūę╗éĆŪ“║═ĖCĮėĮėŅ^Ż¼Ą½Ū“īŹļH╔Ž╩Ū▐DūėŻ¼ĖCĮėĮėŅ^╩ŪČ©ūėĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



