╚╦ŅÉĄ─▀M(j©¼n)╗»▀^│╠ųąŻ¼░ķļSų°╣żŠ▀Ą─░l(f©Ī)š╣Ż¼ī”(du©¼)╚╦╩ųĄ─ņ`Ū╔Š½£╩(zh©│n)▓┘ū„─▄┴”ę¬Ū¾ę▓įĮüĒįĮĖ▀Ż¼▀@éĆ(g©©)▀^│╠ę▓ųØuĖ─ūā║═▀M(j©¼n)╗»┴╦┤¾─XĮY(ji©”)śŗ(g©░u)ĪŻČ°╚ń║╬─▄ūīÖC(j©®)Ų„╚╦Ž±╚╦ę╗śėōĒėąņ`Ū╔ļp╩ųŻ¼ę╗ų▒ę▓╩Ū┐ŲīW(xu©”)╝ęéāūĘŪ¾Ą──┐ś╦(bi©Īo)ĪŻ
ų┴╔┘Å─╩«┴∙╩└╝o(j©¼)─®ķ_╩╝Ż¼┐ŲīW(xu©”)║═╣ż│╠ĮńŠ═ę╗ų▒į┌┼¼┴”ķ_░l(f©Ī)ŅÉ╦Ų╚╦╩ųĄ─ĖąėX║═▀\(y©┤n)äė(d©░ng)╣”─▄Ą─ÖC(j©®)ąĄ╩ųŻ¼Ųõųą░³└©▀\(y©┤n)äė(d©░ng)╣”─▄(ūźĪó╬šĪó═ŲĪó└ŁĪó┤“┐ūĪó▓┘ū„Ą╚)║═ĖąėX╣”─▄(ų„äė(d©░ng)║═▒╗äė(d©░ng)Ąž╠Į╦„▒Ē├µĄ─┘|(zh©¼)ĄžĪóرČ╚║═£žČ╚Ż¼ęį╝░š±äė(d©░ng)Īóē║┴”║═┴”Ą─ĖąėXĄ╚)Ż¼▓óūŅĮKą╬│╔╔ńĢ■(hu©¼)╣”─▄(É█ōßĪó═■├{Īó╬š╩ųĪóųĖųĖ³c(di©Żn)³c(di©Żn)ĪóŠ┤ČYĪó═µ╦Ż║═Ė„ĘN╩ųä▌(sh©¼)Ż¼░³└©ūįįĖ║═ĘŪūįįĖ)ĪŻ▒M╣▄╚╦éāī”(du©¼)╩ų╚ń┤╦ų°├įŻ¼Ą½╚į╚╗¤oĘ©═Ļ╚½└ĒĮŌ╦³éāĪŻ▀@ę▓╩Ū×ķ╩▓├┤ÖC(j©®)ąĄ╩ų╚į╚╗╩ŪÖC(j©®)Ų„╚╦╝╝ąg(sh©┤)ųąūŅļyĄ─╠¶æ(zh©żn)ų«ę╗Ą─įŁę“ų«ę╗ĪŻ
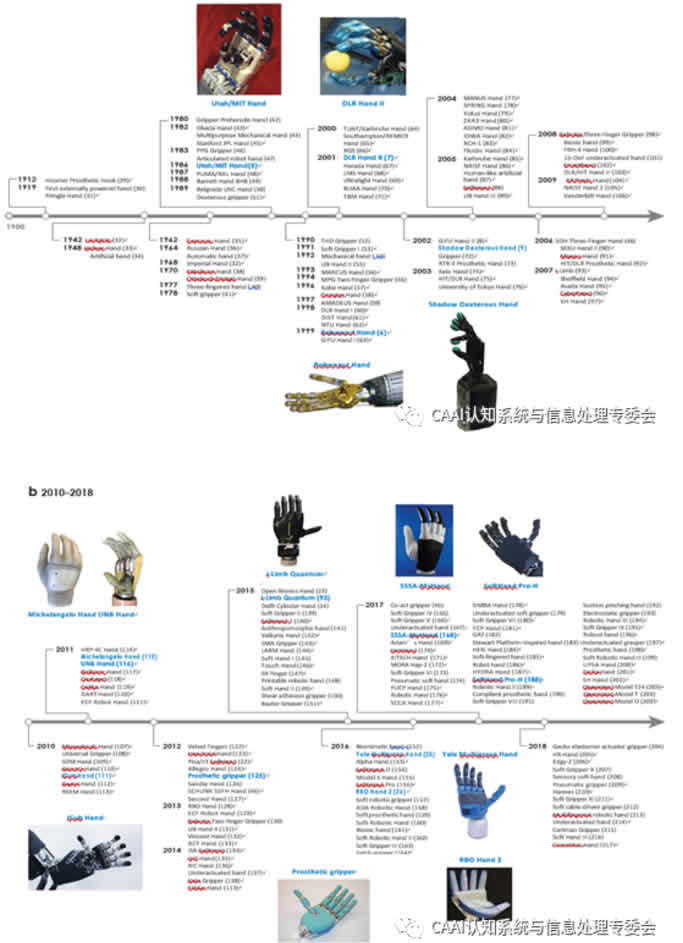
蹊┐╚╦åTįćłD═©▀^Å═(f©┤)ļsĄ─įO(sh©©)ėŗ(j©¼)üĒĘ┬įņ╚╦ŅÉļp╩ųĄ─═Ōė^║═ņ`╗ŅąįŻ¼▓ó╝»│╔┴╦įSČÓ“ī(q©▒)äė(d©░ng)Ų„║═é„ĖąŲ„Ż¼└²╚ń¬q╦¹/MITHĪóRobonautHandĪóDLR(Deutsches Zentrum f©╣r Luft- undRaumfahrt)Hand IIĪóGifu Hand IIĪóShadow Dexterous Hand╝░ŪÕ╚A┤¾īW(xu©”)īOĖ╗┤║łF(tu©ón)ĻĀ(du©¼)ķ_░l(f©Ī)Ą─ŽĄ┴ąņ`Ū╔╩ųĄ╚ĪŻļm╚╗─┐Ū░ėą║▄ČÓīŹ(sh©¬)“×(y©żn)śėÖC(j©®)Ż¼Ą½į┌╣żśI(y©©)ÖC(j©®)Ų„╚╦ĪóĘ■äš(w©┤)ÖC(j©®)Ų„╚╦╔§ų┴╝┘ų½ĘĮ├µŻ¼īŹ(sh©¬)ļHæ¬(y©®ng)ė├öĄ(sh©┤)┴┐╚į╚╗ėąŽ▐ĪŻ×ķ┴╦į÷╝ė═ŲÅVŻ¼Į³─ĻüĒęčĮø(j©®ng)╠ß│÷┴╦ę╗ą®ą┬Ą─ĘĮĘ©║═ĮŌøQĘĮ░ĖŻ¼ęįķ_░l(f©Ī)ėąą¦║═┐╔┐┐Ą─ņ`Ū╔╩ųĪŻ╩┬īŹ(sh©¬)╔ŽŻ¼ļm╚╗īŹ(sh©¬)¼F(xi©żn)┴╦═Ļ├└Ą─ĮY(ji©”)śŗ(g©░u)║═╣”─▄öM╚╦╗»Ī¬Ī¬╝┤▓╗āHį┌═Ōė^╔ŽŻ¼Č°Ūęį┌äė(d©░ng)ū„║═╣”─▄╔Ž┼c╚╦ŅÉĄ─╩ųŽÓ╦ŲŻ©┐╔─▄Ģ■(hu©¼)▀^ė┌Å═(f©┤)ļsŻ®Ż¼Ą½Į³─Ļėą┌ģä▌(sh©¼)ų╝į┌īŹ(sh©¬)¼F(xi©żn)ĘĆ(w©¦n)ĮĪĄ─Īóęūė┌ŠÄ│╠Ą─ĪóĮø(j©®ng)Ø·(j©¼)īŹ(sh©¬)ė├Ą─ņ`Ū╔╩ųŻ¼─▄ē“ł╠(zh©¬)ąą╚╦╩ų▓┘ū„╣”─▄Ą─ūė╝»ĪŻ
╗žŅÖĮ³Äū─ĻĄ─ÖC(j©®)Ų„╚╦▓┘ū„▒╚┘ÉŪķørŻ¼╚ńüå±R▀d▓╔š¬╠¶æ(zh©żn)┘ÉĪóDARPAÖC(j©®)Ų„╚╦╠¶æ(zh©żn)┘ÉĪóIROSÖC(j©®)Ų„╚╦▓┘ū„▒╚┘ÉĄ╚Ż¼┤¾ČÓöĄ(sh©┤)Å═(f©┤)ļsĄ─ūź╚Ī╝╝ąg(sh©┤)Č╝╩▄ĄĮ┴╦╠¶æ(zh©żn)Ż¼▀@ą®▒╚┘É▒Ē├„Ż¼ęį║å╗»įO(sh©©)ėŗ(j©¼)×ķ─┐ś╦(bi©Īo)Ą─ĘĮĘ©─▄ĦüĒ’@ų°Ą─ą¦ęµĪŻĄ┌1ī├üå±R▀d▓╔š¬╠¶æ(zh©żn)┘ÉĄ─½@ä┘š▀╩Ūę╗éĆ(g©©)╗∙ė┌│ķ╬³ŽĄĮy(t©»ng)Ą──®Č╦ą¦æ¬(y©®ng)Ų„Ż╗į┌DARPAÖC(j©®)Ų„╚╦╠¶æ(zh©żn)┘Éųą▓╔ė├Ą─Ę┬╚╦ÖC(j©®)Ų„╚╦Č╝ø]ėą═Ļ╚½“ī(q©▒)äė(d©░ng)Ą─öM╚╦╩ųŻ¼│¼▀^15éĆ(g©©)łF(tu©ón)ĻĀ(du©¼)(25éĆ(g©©)ģó┘Éš▀ųą)╩╣ė├Ą─╩Ūę╗éĆ(g©©)ų╗ėą3╗“4éĆ(g©©)╩ųųĖĄ─Ą═“ī(q©▒)äė(d©░ng)╩ųŻ╗Äū┤╬Ą─IROSÖC(j©®)Ų„╚╦ūź╚Ī║═▓┘┐v▒╚┘ÉųąŻ¼Č╝╩Ū║åęūÖC(j©®)ąĄ╩ų½@╚Ī╣┌▄ŖŻ¼Ę┤Č°╩ŪÅ═(f©┤)ļsČÓ╣”─▄Ą─ņ`Ū╔╩ųį┌▒╚┘Éųą╩¦└¹ĪŻ
į┌▀^╚źĄ─Äū╩«─Ļ└’Ż¼įSČÓÖC(j©®)Ų„╚╦蹊┐ąĪĮMČ╝īŻūóė┌śO║åų„┴xįO(sh©©)ėŗ(j©¼)ĘĮĘ©ĪŻį┌▒Ż┴¶öM╚╦╗»įO(sh©©)ėŗ(j©¼)Ą─įSČÓā×(y©Łu)³c(di©Żn)Ą─═¼Ģr(sh©¬)Ż¼į┌įO(sh©©)ėŗ(j©¼)║═┐žųŲĘĮ├µ▀M(j©¼n)ąąįŁätąįĄ─║å╗»Ż¼┐╔ęį║Ž└ĒĄžĮĄĄ═ŽĄĮy(t©»ng)Ą─Å═(f©┤)ļsČ╚Ż¼░³└©ł╠(zh©¬)ąąŲ„Īóé„ĖąŲ„║═│╠ą“┤·┤aĄ─öĄ(sh©┤)┴┐ĪŻ┤╦═ŌŻ¼▄ø¾wÖC(j©®)Ų„╚╦ĘĮĘ©ę▓║▄ėąė├Ż¼Į³─ĻėąĖ∙ō■(j©┤)▀@śėĄ─įŁ└ĒįO(sh©©)ėŗ(j©¼)Ą─ÖC(j©®)ąĄ╩ųŻ¼į┌ūź╚ĪĄ─═©ė├ąįĪó¶ö░¶ąį║═┐╔┐┐ąįĘĮ├µ╚ĪĄ├┴╦║▄║├Ą─ą¦╣¹ĪŻ
▌oų·ÖC(j©®)Ų„╚╦▒žĒÜ─▄ē“į┌╚š│Ż╔·╗Ņ╗Ņäė(d©░ng)ųą┼cŁh(hu©ón)Š│║═╚╦ŅÉ░▓╚½Ąž╗źäė(d©░ng)║═║Žū„Ż¼▀@ęŌ╬Čų°╩ųąĶꬹĪĪó▌pĪóņ`╗Ņ
ßt(y©®)»¤Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ė∙ō■(j©┤)ßt(y©®)į║ąĶŪ¾Ęųäeł╠(zh©¬)ąą▀f╦═╗»“×(y©żn)å╬Īó╦Ä╬’Ą╚╣żū„Ż¼ė├ÖC(j©®)Ų„╚╦┤·╠µßt(y©®)ūo(h©┤)▀^│╠ųą║åå╬Ą½║─┴”Ą─┴„│╠╗»╣żū„
į┌Š▐┤¾Ą─╣½╣▓ąl(w©©i)╔·╬ŻÖC(j©®)├µŪ░Ż¼¤o╚╦ÖC(j©®)─▄ē“▀M(j©¼n)╚ļę▀Ūķć└(y©ón)ųžģ^(q©▒)ė“ūįäė(d©░ng)ćŖ×óŽ¹ČŠä®Ż¼ĮĄĄ═æ¬(y©®ng)╝▒╚╦åT▒╗▓ĪČŠĖą╚ŠĄ─’L(f©źng)ļU(xi©Żn)
▒├║═é„ĖąŲ„┐╔ęį░▓čbį┌┐┐Į³╩ų▒█Ą─ÖC(j©®)Ų„╚╦Ąūū∙╔Ž▀M(j©¼n)ąą▒Żūo(h©┤)Ż¼▓óīŹ(sh©¬)¼F(xi©żn)┼cÖC(j©®)ąĄ╩ų▀h(yu©Żn)│╠▀BĮė
Hi3559AV100 Hi3519AV100 Hi3516DV300 Hi3516CV500 ĢN“v310 ą±╚š ┬Āز ╦╝į¬220 BM1682 BM1880 DeepEye1000 T01
ÖC(j©®)Ų„╚╦ę▓Č╝│╔×ķæ¬(y©®ng)╝▒Š╚į«ōīļU(xi©Żn)Ą─ś╦(bi©Īo)┼õŻ¼Š╚į«ÖC(j©®)Ų„╚╦░l(f©Ī)š╣┐šķg║═Øō┴”Ą─▒¼░l(f©Ī)Ż¼╝╚Ą├ęµė┌ąĶŪ¾Ą─ßīĘ┼Ż¼ę▓ļx▓╗ķ_╝╝ąg(sh©┤)═╗ŲŲ┼c╔╠ė├ār(ji©ż)ųĄĄ─ų¦ō╬
ųŪ─▄ĀIõNÖC(j©®)Ų„╚╦─▄ē“╗∙ė┌ĀIõNĪó┤▀╩šĄ╚▓╗═¼ł÷Š░┼õų├═Ō║¶ī”(du©¼)įÆ┴„│╠Ż¼╝Ü(x©¼)Ęųł÷Š░Īó├Ķ└LŠ½£╩(zh©│n)┐═涫ŗŽ±▓óī”(du©¼)æ¬(y©®ng)▓╔╚Ī▓╗═¼įÆąg(sh©┤)Ż¼│╔×ķįōŃyąąųŪ─▄╗»▐D(zhu©Żn)ą═Ą─║Žū„ÅS╔╠ĪŻ
Ą┌╦─┤·╚╦╣żųŪ─▄┼õŠW(w©Żng)ĦļŖū„śI(y©©)ÖC(j©®)Ų„╚╦ęč│╔╣”═Ļ│╔ļp▒█ūįų„Īóå╬▒█╚╦ÖC(j©®)ģf(xi©”)═¼Īóå╬▒█▌oų·ūįų„ 3 ĘN╚╦╣żųŪ─▄┼õŠW(w©Żng)ĦļŖū„śI(y©©)ÖC(j©®)Ų„╚╦čą░l(f©Ī)Ż¼▓ó╚½├µ═Č╚ļ┼õŠW(w©Żng)▀\(y©┤n)ąą
ųŪ─▄┐═Ę■ÖC(j©®)Ų„╚╦═©▀^šZę¶ūR(sh©¬)äeĪóūį╚╗šZčį└ĒĮŌĪóšZę¶║Ž│╔Ą╚╝╝ąg(sh©┤)į┌▓╗═¼Ą─śI(y©©)äš(w©┤)ł÷Š░Ž┬ūįäė(d©░ng)║Ž│╔Ų¾śI(y©©)╦∙ąĶįÆąg(sh©┤)Ż¼ų¦│ųųŪ─▄å¢┤Į╗╗ź
ÖC(j©®)Ų„╚╦╩ų▒█Ū░Č╦čbėą▓µ║═╔ūūėŻ¼─▄ē“?q©▒)ó╩│╬’ūįä?d©░ng)ŖAŲŻ¼▓ó╦═ĄĮ▓┘ū„š▀ūņ▀ģŻ¼┐┐ų°╬╣╩│ÖC(j©®)Ų„Ż¼Ņi▓┐ęįŽ┬░c»łĄ─▓Ī╚╦Īóų½¾w▓╗▒ŃĄ─└Ž╚╦Ż¼ę▓─▄ūįąą▀M(j©¼n)╩│
ć°«a(ch©Żn)ĻP(gu©Īn)╣Ø(ji©”)ų├ōQ╩ųąg(sh©┤)ÖC(j©®)Ų„╚╦ėų├¹╣Ū┐Ų╩ųąg(sh©┤)ī¦(d©Żo)║ĮČ©╬╗ŽĄĮy(t©»ng)╠Ņča(b©│)┴╦ųąć°į┌ĻP(gu©Īn)╣Ø(ji©”)ų├ōQ╩ųąg(sh©┤)ÖC(j©®)Ų„╚╦ŅI(l©½ng)ė“Ą─┐š░ū
Mars Express Hayabusa Rosetta Phoenix Curiosity Hayabusa 2 OSIRIS-REx Insight ChangĪ»e 5 ExoMars Mars2020 Vega 1/2 Mars Polar Lander MERs




